반응형
ROS Installation - 해당 사이트를 참고 했습니다.
( http://wiki.ros.org/ROS/Installation )
잘보시면, "LTS, supported until -- -- -- -- -- "
임을 알 수 있습니다.
포스팅을 하는 해당 일자 ( 16-06-2020 ) 기준으로
ROS Melodic Morenia
Released May, 2018
LTS, supported until May, 2023
Recommended for Ubuntu 18.04


첫 번째로,
Allow "restricted, universe and multiverse"를 해줍니다.


그 다음에,
이제부터 회색란에 나와있는
명령어를 터미널에 하나씩 작성하시면 됩니다.
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
$ sudo apt update
$ sudo apt install ros-melodic-desktop-full
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
[[ 이는 새로운 쉘이 생행될 때 마다 ROS 환경 변수가 bash 세션에 자동으로 추가되는 기능이므로 편리하다. ]]
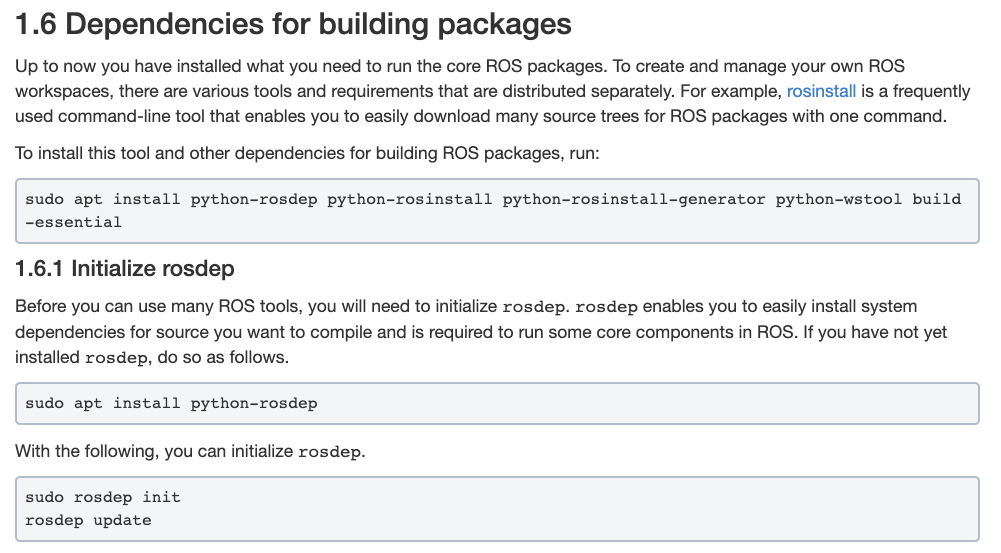
$ sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
$ sudo apt install python-rosdep
$ sudo rosdep init
$ rosdep update


설치가 잘 되었는지 확인하고자 하신다면
"ctrl + alt + T" ( Ubuntu 18.04에서 터미널을 불러주시고 )
다음의 3가지 명령들을
각각 New Window 에 넣어주면 됩니다..
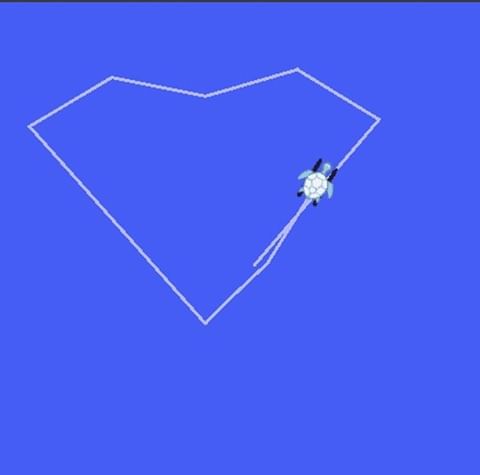
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
반응형
'ROS > Ubuntu 18.04' 카테고리의 다른 글
| [ 몽돌 ] Gazebo 설치하기 - feat. Ubuntu 18.04 (0) | 2020.06.16 |
|---|

댓글